新マウス機体 MIZUHOv2
Tweet去年のマイクロマウス機体、MIZUHOの改良版を作っています。
概要
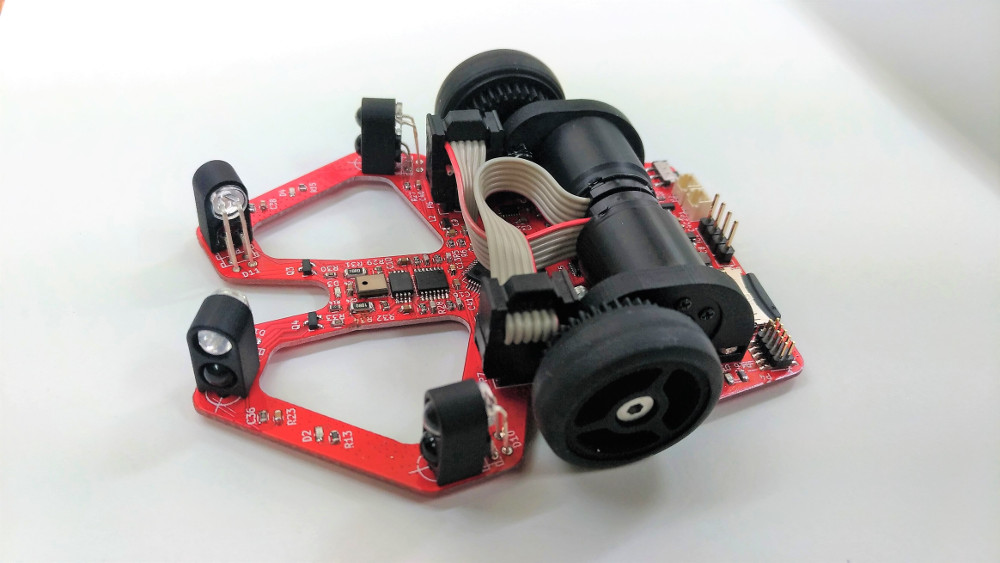
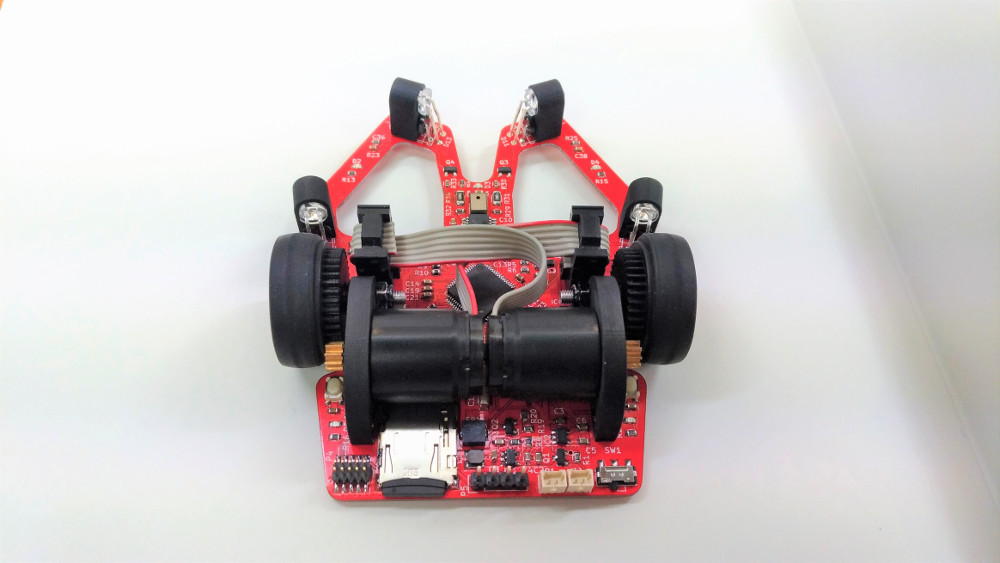
2017年度のマイクロマウスの大会に向けて、去年のMIZUHOを改良する形で新しいマシンを制作しています。 名前はMIZUHOv2です。
機体の機械的な部分はFusion360で設計をしています。 Fusion360の共有機能を使うと↓みたいに表示され、色々いじれるので面白いです。 分解とかもできるので見てみてください。
回路はKiCadで設計をしています。 現段階での回路図はここに置いておきます。
KiCadの階層シートを使って、同じ回路図を使いまわすようにしています。
仕様
| 外形 WxLxH | 76x90x24mm |
| 重量 | 85g |
| ギア比 | 9:36 |
| モーター | FAULHABER 1717-006SR + IEH2-1024 |
| バッテリー | Lipo 1cell 120mA ×2 |
| マイコン | STM32F405 |
| IMU | MPU6500 |
| モータードライバー | DRV8835 ×2 |
| 赤外線LED | VSLY5850 |
| フォトダイオード | SFH213FA |
ポイント
壁センサ
前作のMIZUHOと同じ回路を使っています。
大会会場の環境光の影響をなくすために赤外線LEDを点滅させ、 受光した光から点滅させた周波数成分のみを取り出そうというアプローチをしています。
回路とマイコンに取り込んだ後の信号処理については以前まとめたものがあるので、 よければそちらも見てください。
詳しいことはそちらに書いてあるので、今回は大まかなことだけを書いています。
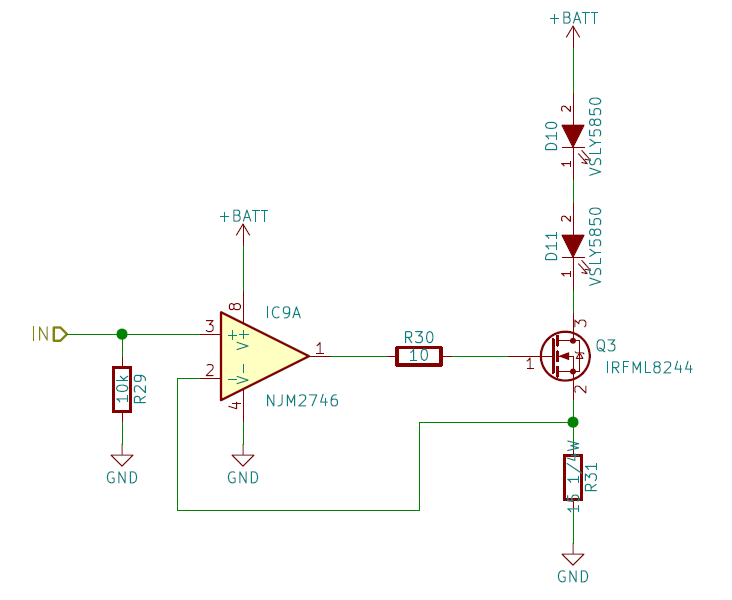
発光回路
定電流回路によってLEDに流れる電流を制御できるようにしています。 マイコンから矩形波を入力することで好きな周波数(10kHzを予定)で点滅させられます。
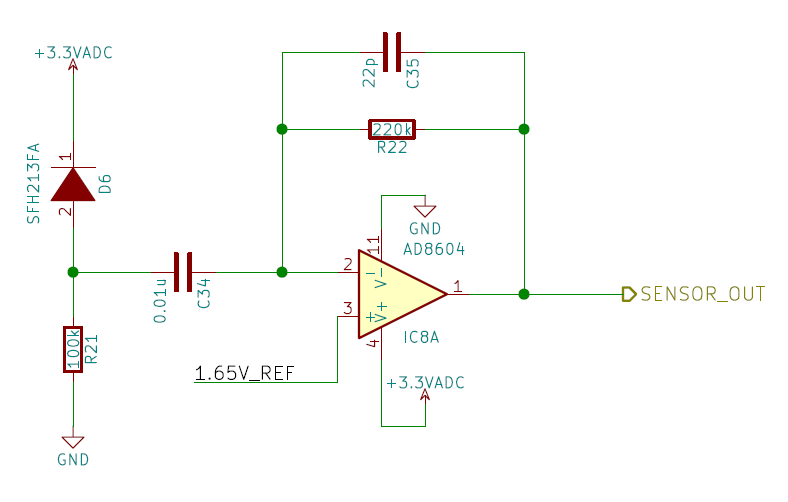
受光回路
フォトダイオードを使って光を電気信号(電流)に変えています。 フォトダイオードに流れた電流はオペアンプとR22C35を使ったI-V変換回路でLPFをかけつつ電圧に変換しています。
R21C34によってフォトダイオードに流れた電流の数100Hzまでの低周波成分は先のI-V変換回路に流れないようになっています。 これによってHPFのような特性を実現しています。
赤外線LEDとフォトダイオードの固定
前回のMIZUHOでは、特にLEDマウンタなどを使わずに赤外線LEDとフォトダイオードを基板に乗せていました。 実際にマシンに乗せて壁センサを使用してみると、赤外線LEDやフォトダイオードが少しでも傾くとセンサの値が大きく変化していました。 なのでふとしたことからセンサが傾き、壁があるかないかの閾値の再設定が必要になったり、センサの傾きをこまめに微調整することが必要になっていました。
微調整をするのが非常に面倒だったので、今回はガッチリとセンサを固定して、一回だけのキャリブレーションで対応できるようにしたいと思っています。
そのために、LEDマウンタを使うことで赤外線LEDとフォトダイオードの相対的な位置をずれないようにしています。 さらにLEDマウンタに出っ張りをつけ、基板にその出っ張りと同じサイズの穴を空けることでLEDマウンタもしっかりと固定しています。
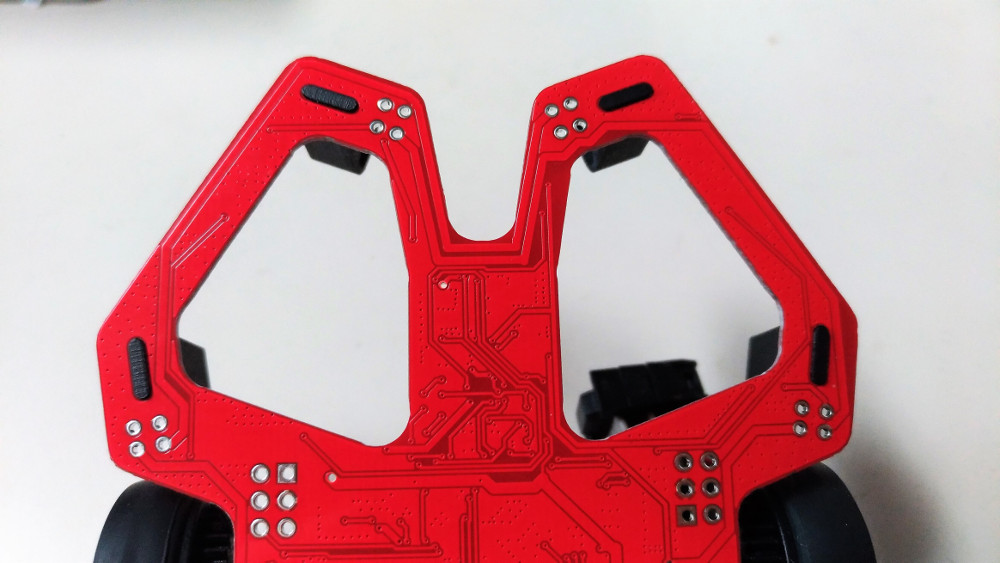
少しくらいLEDを触ってもずれなくなりました。
電源回路
電源周りの回路はこんな感じになっています。
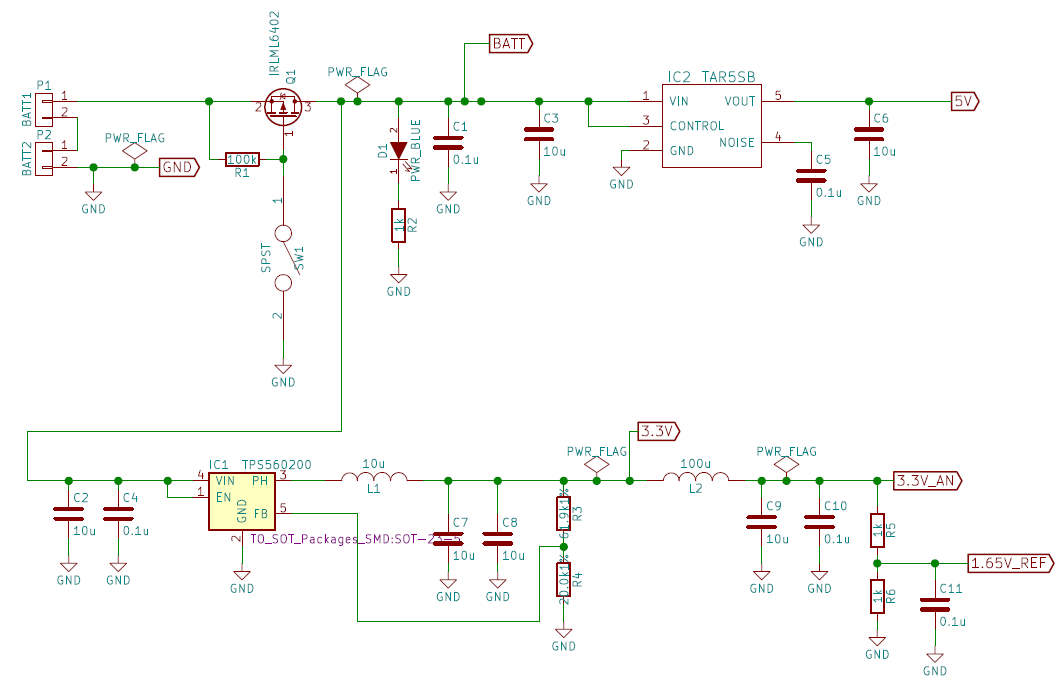
電源スイッチには最大2Aくらい流れますが、それに耐えられるスイッチは結構サイズが大きくなってしまうので、 PchのMOSFETを使うことでスイッチ自体は小さなものを使用しています。
バッテリーは2cellの8Vくらいで、そこから
- エンコーダのための5V
- デジタル用の3.3V
- アナログ用の3.3V
を生成しています。
5Vはリニアレギュレータ(TAR5SB50を使ってバッテリーから降圧して生成しています。 デジタル用の3.3VはDC-DCコンバータ(TPS560200)でバッテリーから降圧して生成しています。 アナログ用の3.3Vはデジタル用の3.3Vに、二次のLPFを通したものを使用しています。
SD micro card
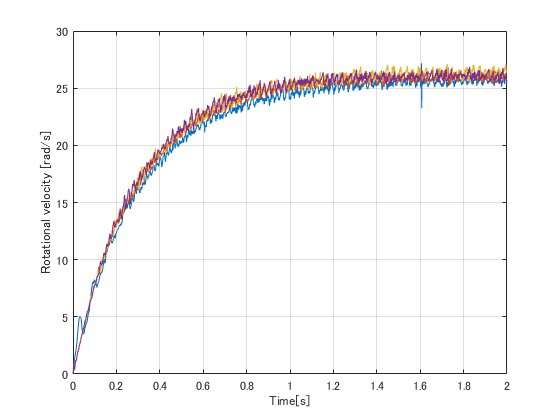
走行中のログをたくさんとりたかったので、SD micro card を載せています。 マイコンとはSDIOで接続していて、ファイルシステムの操作にはFatFsを使用しています。
PCでも読み取れるファイルに文字列としてデータが保存できるので、MATLABなどに簡単にデータを読み込んで解析することができます。
UARTをBLEで送信 (B-ART)
現在、B-ARTというUARTをBLEを使って送信するモジュールを別で作っています。
B-ARTは3.3V, GND, TX, RX の4pinさえ繋いでやればUARTを無線で飛ばせるようになるので、 マウス機体にもこんな感じで挿して使うことができます。

B-ARTはPCのUSBに挿すバージョンもあり、こちらにはFTDIのUSB-UART変換ICが載っているので、 PC側からはシリアルポートとして認識されます。 これらの2種類のB-ARTを組み合わせることで、PCからは普通のシリアル通信をする要領で無線化されたUARTを利用することができます。
マイク
何に使うかは秘密です(音声認識で操作とかではない)。 大会で何かをします。
マイクは秋月に売っていたデジタルでデータが取れるマイクを使用しています。
今年のやりたいこと
機体の制御と探索アルゴリズムを昨年度よりも改善したいと思っています。
制御面では
- 機体のシステム同定をする (<-今やってる)
- ベジェ曲線で軌道計画をし、それをトレースする制御をしてみる
探索アルゴリズムでは
- グラフのモデリング(エッジのつなぎ方・重みの付け方)を工夫する
- Lifelong Planning A* や D* といったIncremental search を使ってみる
を試してみる予定です。
目標
- 地区大会にでる
- クラシック競技のエキスパートクラスで決勝に残る
学生として参加できるのは今年で最後なので、がんばります。
