NJU6080で作る赤外線LED発光回路
TweetNJU6080という定電流LEDドライバをマイクロマウスの赤外線発光回路に使えないか検証しました。
はじめに
最近秋月電子でNJU6080という定電流LEDドライバの取り扱いが始まりました。 パッケージがSOT-23-6と小さく、PWM入力も可能なので、マイクロマウスの壁センサのための赤外線LED発光回路に使えるんじゃないかと思いました。 そこでまずは発光回路単体でLED電流の過渡応答が十分であるかを測っていました。
前提として、マイクロマウスの壁センサに以下のようなものを使っています。
この中の定電流回路の部分を定電流LEDドライバIC一個で置き換えれないかという目論見です。 記事中の定電流回路はアナログの電圧値も入力することができるのですが、結局デジタル入力でしか使っていませんでした。 なのでNJU6080のようなデジタル入力だけを受け付けるもので置き換えても問題ないはずです。
結論として、自分の使い方においては十分な性能だったので、次回マイクロマウスの回路を作るときには使おうと思います。
実験方法
NJU6080の周りに以下のような部品を取り付けて、赤外線LEDに流れる電流を制御(ON/OFF)できる回路を作りました。 NJU6080はPWM入力がHighのときに抵抗Rs=3.3Ωに0.2Vがかかるように動作するので、電流は60mA(=0.2V/3.3Ohm)流れるはずです。

ICのPWM入力ピンにはデジタルのパルスを入力します。 LEDに流れた電流は抵抗の電圧を測って抵抗値から電流に換算します。 PMW入力へのパルスの印加と入力電圧・出力電流(抵抗電圧)の測定はAnalog discovery 2を使いました。
測定結果
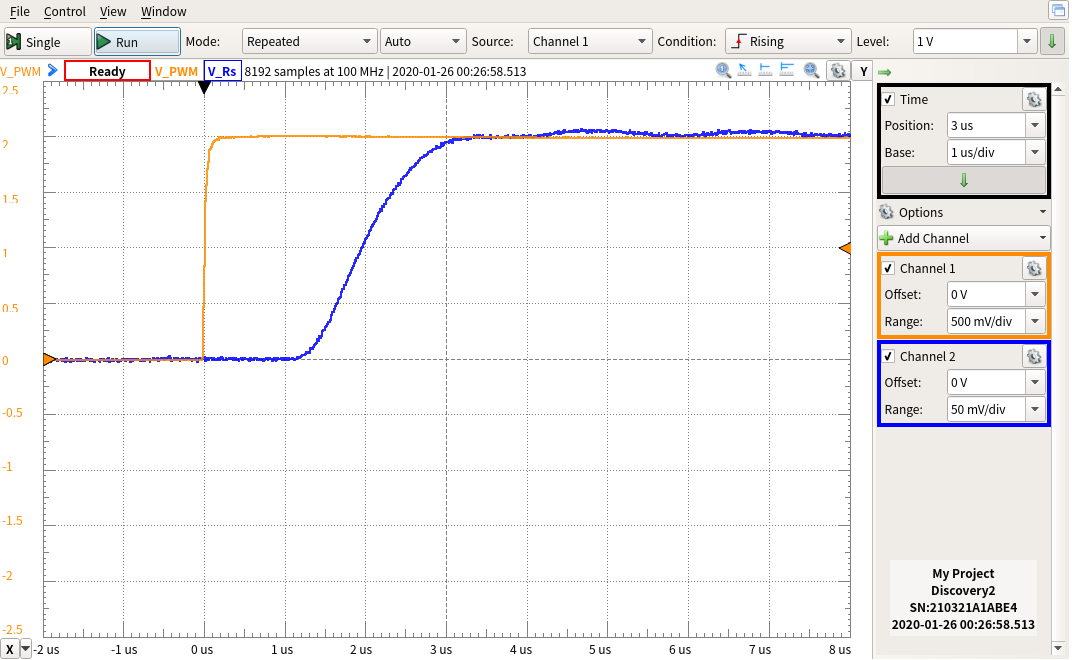
以降ではAnalog discoveryで測定した上の回路図中のV_PWMとV_Rsの電圧波形を載せています。 V_Rsの電圧値はRs=3.3Ωで割るとLEDに流れた電流値に換算できます。
過渡応答
立ち上がり
電流は1.5usくらいのDelayの後に時定数0.6usくらいで立ち上がっています。
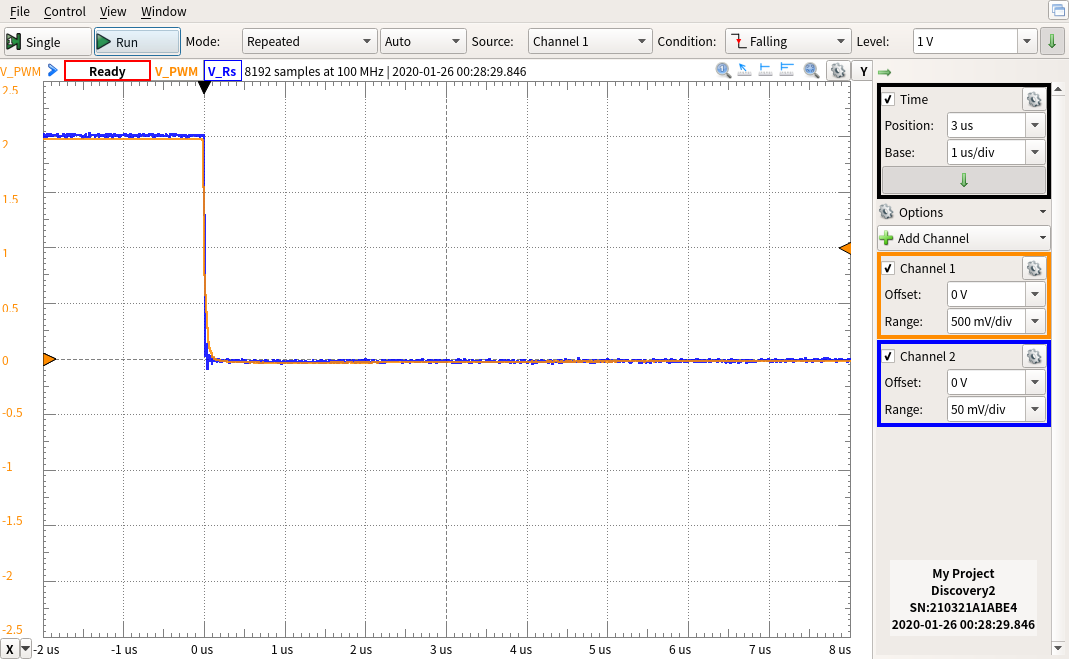
立ち下がり
立ち下がりは急峻に電流が0Aになっています。
矩形波を入れたときの応答
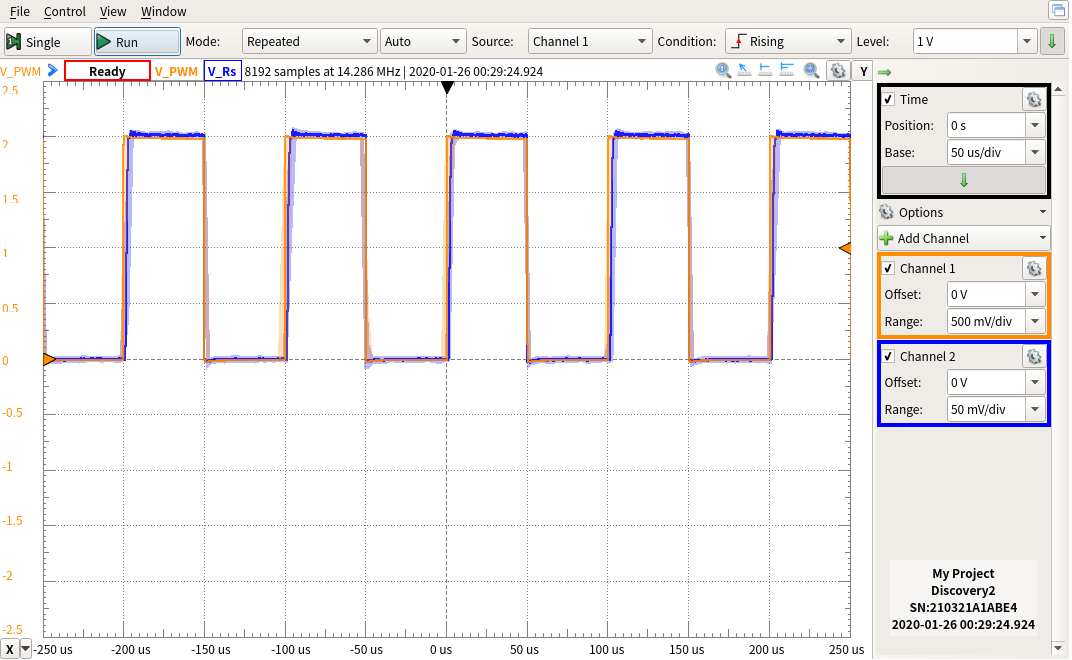
マイクロマウスの壁センサでは、赤外線LEDに10kHzの矩形波状の電流を流していました。 その状況を想定して10k, 50k, 100kHzの矩形波を入力してどんなものかを見てみました。
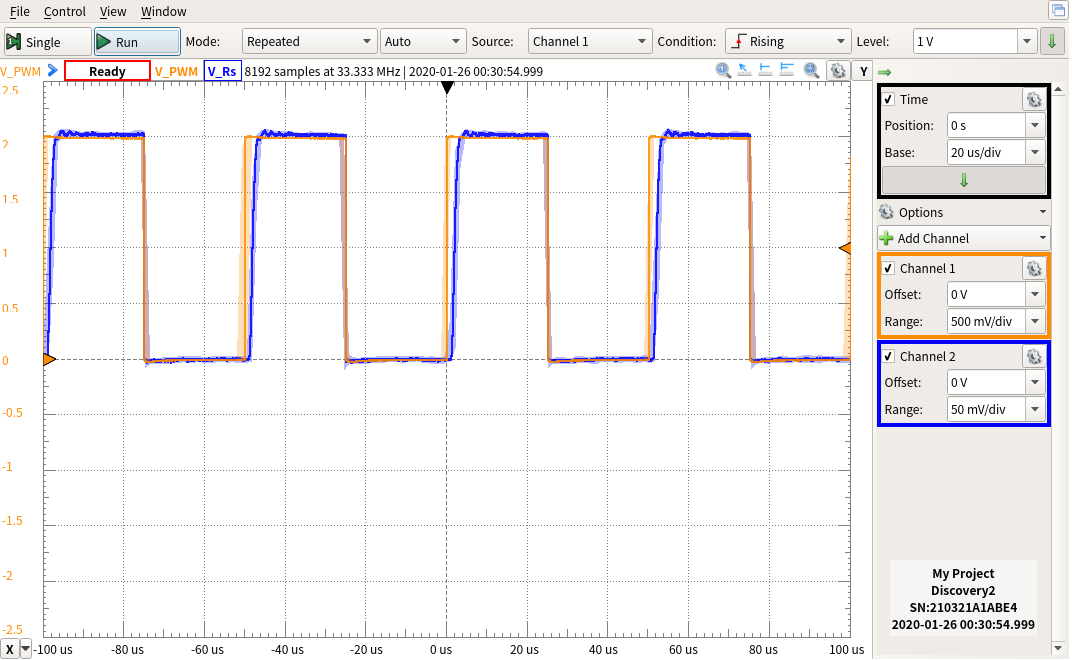
10kHz
応答速度的には問題なさそうです。 マイクロマウスの壁センサでは10kHzで使おうと思っているので、この応答を見て使えるなと判断しました。
20kHz
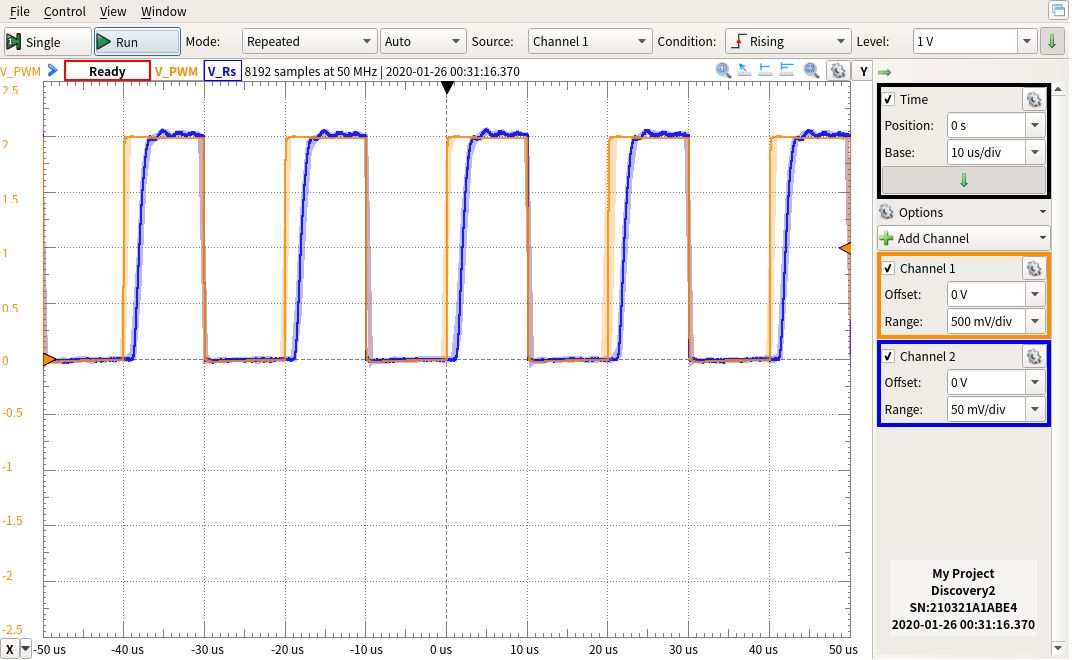
50kHz
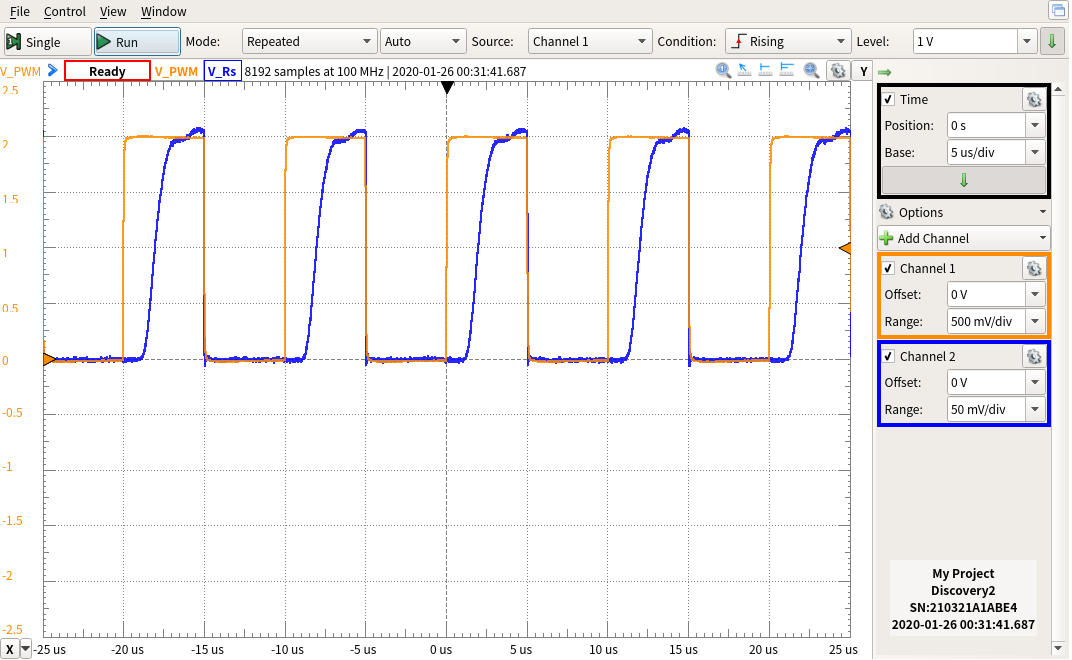
100kHz
このくらいになるとDelayや立ち上がりの遅れが支配的になってくるので安定して使うことはできなさそうです。
結論
NJU6080はLED電流を矩形波で20~50kHzくらいまでは使えそうです。
以前紹介したマイクロマウスの壁センサでは回路の部品数が多くなることと、 定電流回路を安定して動くように設計することが問題でした。 NJU6080を使えば設計も楽で、総部品数も少なくFootprintも小さく済ますことができそうです。 次回マイクロマウスの機体を作り直すときには使っていこうと思います。
