玉乗りロボット2号機
Tweet去年あたりから作っている玉乗りロボット2号機がなんとなく玉乗りできるようになりました。
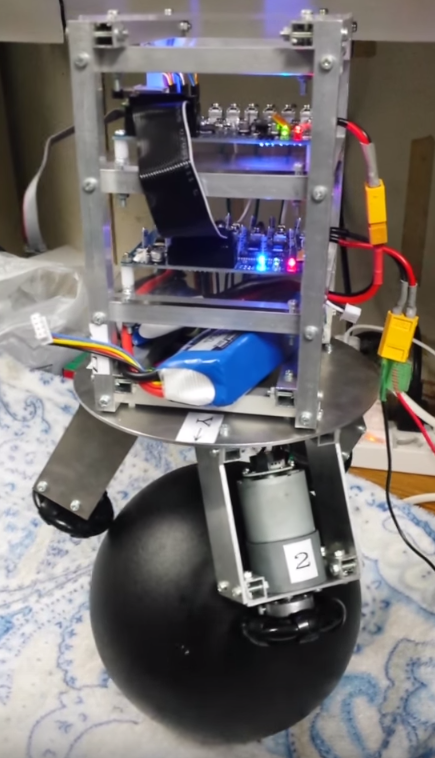
実際に玉乗りしている動画はこちらになります。
まだいろいろと詰められていないので毛布の上での動作になっています。
同様の玉乗りロボットは以前も制作をしていました。(1号機)
1号機についてはロ技研ブログの方にいくらか記事があります。
1号機はバスケットボール上で玉乗りをするのを目標にしており、 転がりにくい座布団の上に限り玉乗りをすることができました。
その動画はこちらになります。
普通の床でも更に安定させ、指示された位置に動かしたりもしたかったので 改良版を制作することに決定しました。
今回は前回のものから何が変わったのかを一部紹介したいと思います。
前作からの改良
1号機と比べて2号機は、機構的な部分でも、回路・制御手法においても数々の改良点があります。 ただ、制御関連についてはまだ詰められてはいないので、もう少ししてから紹介したいと思います。
機構的な部分では次の改良を行いました。
- タイヤを2重のオムニホイールから一重のオムニホイールにした
- 玉をバスケットボールからプラスチック球にした
タイヤの変更
1号機はKORNYLAKのオムニホイールを使っていました。 大きさがちょうどよく、とにかく安いです。
実際にロボットを組んで動かしてみると、スムーズにタイヤを回しただけでもロボットがガタガタと振動していました。 オムニホイールの周囲の小さい樽が2重になっているので、接点と回転中心の距離が回転に応じて変化をしてしまい、このような振動が起こっていました。
玉乗りロボットは東北学院大学の熊谷先生も研究をされているおり、 熊谷先生の玉乗りロボットでは樽が1重のオムニホイールを使っています。 1重のオムニホイールならば常に接点と回転中心が同じ距離にあるので、 球体に接している状態でもガタガタすることはありません。
1重と2重のオムニホイールの違いはこの画像を見ればわかると思います。

こういう1重のオムニホイールのほうが2重のものよりも適していることは前回の玉乗りロボットを作る前からわかっていたのですが、 調べるとこのオムニホイールの構造は特許が取られているのものらしく、 製造・販売しているところは当時(2014年冬)は見つかりませんでした。
しょうがなく2重のオムニホイールを使っていたのですが、 2014年6月にVstoneからなめらかオムニホイール が発売されました。
そこで2号機ではこのなめらかオムニホイールを採用しました。 前回のような振動もなくなり、球体に対しても常に同じ位置で接してくれるので今のところはいい感じです。
玉の変更
1号機は普通のバスケットボールを使っていました。 使う予定のオムニホイールに対する大きさがちょうどよかったのと、 表面がよくグリップしそうな素材だったのでバスケットボールを採用しました。
しかしバスケットボールの表面に結構な凹凸があったことと、 新しく使おうとしているなめらかオムニに対してバスケットボールが大きすぎるという点から、 もう少し小さく表面がきれいな玉はないかと考えました。
そこで、 ボールのベースとして東急ハンズに売っていた プラスチック球をベースに、 表面にラバースプレーを塗ることで 求めていた玉を作りました。 ラバースプレーは色々試しましたが、これがいい感じでした。

売り上げランキング: 4,008
東急ハンズに売っていたプラスチック球は安くて十分に強度がありそうだったのでいいのですが、表面がつるつるです。 前述のなめらかオムニも樽がプラスチック製で滑ってしまうので、ラバースプレーを塗りました。 これは球の表面にラバースプレーを塗って摩擦を強めるというのは熊谷先生も使っていた方法です。
おわりに
今回はとりあえず玉乗りができたという動画と、機構的な改良点を紹介しました。 今後他の改良点や、回路や制御の技術的な話を書いていこうと思います。
