

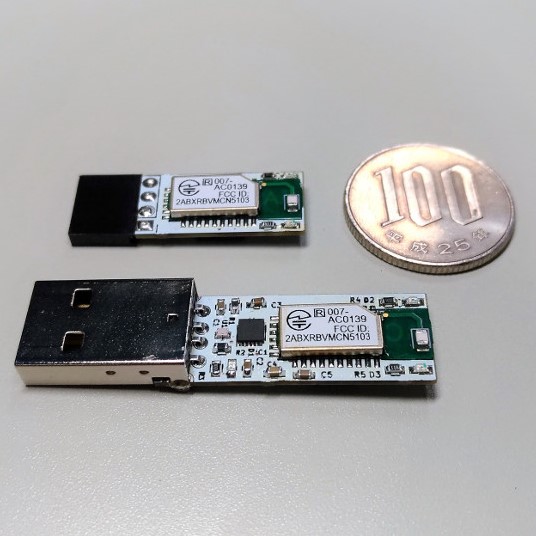
超便利 最強デバッガ J-Link
マイコン用デバッグプローブであるJ-Linkが超便利なので紹介します。 J-Linkを購入しなくても、STLink・LPCLinkをJ-Link化する方法も紹介します。
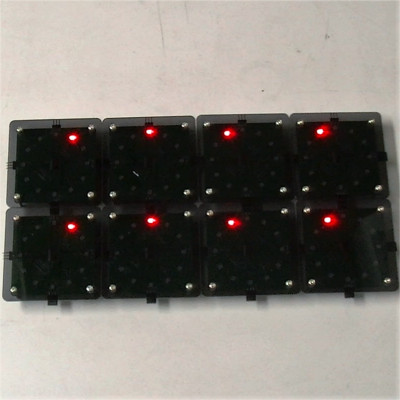
KURAMOTO-蔵本モデルをLEDで可視化する
蔵本モデルをLEDとマイコンを使って可視化するものを作りました。 基板をつなげるとLEDの発光パターンが同期していきます。 MFT2017で展示します。




Eclipse+GDB+openocdでFreeRTOSの複数のタスクを追う
OpenOCDやJ-Link GDB Serverを使って、FreeRTOS上で動くすべてのタスクをデバッガから同時に追う
